Modell
Ziele
Das Hohenheimer Reifenmodell basiert auf einem ausschließlich physikalischen Ansatz. Dieser dient sowohl den Entwicklungszielen eines breiten Gültigkeitsbereichs und einer geringen Anzahl an physikalischer Parameter. Diese Parameter sollen primär an den institutseigenen Prüfständen mit hoher Genauigkeit ermittelt werden. Zur Erhöhung der Modellverfügbarkeit sollen sie jedoch bei Bedarf ebenfalls aus Fahrversuchen oder anhand von Herstellerangaben ermittelt werden können. Da das Modell den Schlupf nicht als Eingangsgröße verwendet, ist es zudem numerisch robust und zeichnet sich durch kurze Rechenzeiten aus.
Aufbau und Einbindung
Das Hohenheimer Reifenmodell ist als Speichenmodell mit einer adaptiven Aufstandsfläche aufgebaut, Bild 1. Kraftelemente in radialer, tangentialer und axialer Richtung sind jeweils charakteristischen Kraftübertragungsvorgängen landwirtschaftlich genutzter Reifen zugeordnet. Die Kraftübertragung zwischen Fahrbahn und Reifenlatsch wird mit Hilfe eines Stick-Slip-Ansatzes modelliert. Eine vollständige Beschreibung der Modellstruktur ist verschiedenen Publikationen von Witzel und Bürger zu entnehmen.
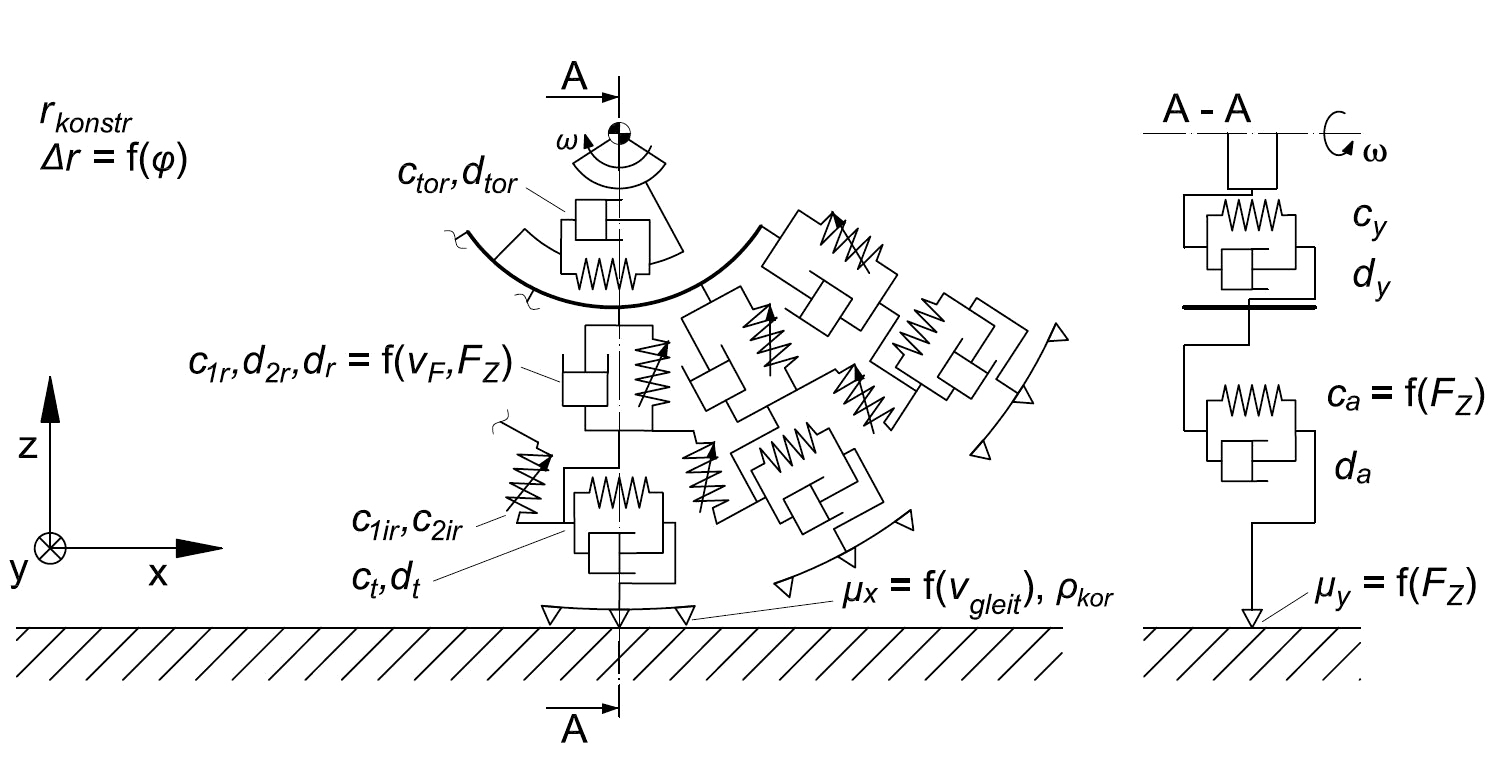 | ||
| Bild 1: Aufbau des Hohenheimer Reifenmodells mit Angabe benötigter Parameter | ||
Die durch den Reifen übertragenen Kräfte werden auf Basis der Deformationsvorgänge des Reifens berechnet. Dazu benötigt das Modell folgende 6 Eingangsgrößen:
- Längs- und Quergeschwindigkeit der Radnabe
- Abstand der Radnabe zur Fahrbahnoberfläche
- Sturzwinkel
- Winkelgeschwindigkeiten um die Quer- und Vertikalachse
Das Reifenmodell ist in MATLAB/Simulink erstellt und kann mittels Co-Simulation über eine Schnittstelle mit beliebiger Mehrkörpersimulationssoftware eingesetzt werden, Bild 2. Bei einer Co-Simulation werden Ein- und Ausgangsgrößen des Reifenmodells bei konstanter Schrittweite zwischen den beiden Simulationspartnern ausgetauscht.
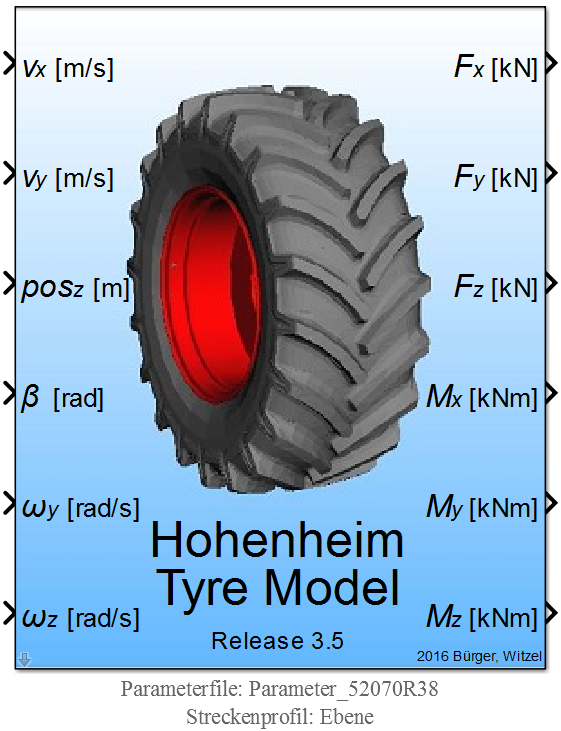 | ||
| Bild 2: Einbindung des Reifenmodells via MATLAB/Simulink | ||
Parametrierung
Die verwendeten Modellparameter können aus unterschiedlichen Quellen ermittelt werden, die höchsten Genauigkeiten liefern jedoch aufgrund einer hohen Reproduzierbarkeit und einem breiten Verstellbereich Prüfstandsversuche, Tabelle 1.
Tabelle 1: Modellparameter und ihre Quellen
| Modellparameter | Datenquelle |
|---|---|
| konstruktiver Reifenradius | Herstellerangaben |
| dynamischer Rollradius | Flachbandprüfstand |
| Reifenunrundheit | |
| radiale Feder- / Dämpfer-Koeffizienten | |
| interradiale Federsteifigkeiten | |
| tangentiale Feder- / Dämpfer-Koeffizienten | Einzelradmesseinrichtung |
| axiale Feder- / Dämpfer-Koeffizienten | |
| zusätzliche Feder- / Dämpfer-Koeffizienten |
Validierung
Die Validierung des Hohenheimer Reifenmodells erfolgt in zwei Schritten an den Prüfständen des Instituts für Agrartechnik.
Validierung am Einzelreifen
Das simulierte vertikale Kraftübertragungsverhalten sowie die Abbildung der Reifenunrundheit wird dabei mit Messungen am Flachbandprüfstand abgeglichen. Die Kraftübertragungsvorgänge in longitudinaler und lateraler Richtung sowie das Verhalten bei überlagerten Schlupfzuständen und bei Hindernisüberfahrten werden mit Messungen an der Einzelradmesseinrichtung validiert.
Validierung am Gesamtfahrzeug
Den letzten Schritt der Validierung stellt der Vergleich der messtechnisch ermittelten Kraftverläufe während Fahrversuchen mit dem Versuchsschlepper und den simulierten Verläufen an einem MKS-Modell dieses Schleppers in Co-Simulation mit dem Hohenheimer Reifenmodell dar.